 PDF(254 KB)
PDF(254 KB)

Implementation of Presolving and Interior-Point Algorithm for Linear & Mixed Integer Programming: SOFTWARE
Adrien NDAYIKENGURUTSE, Siming HUANG
Journal of Systems Science and Information ›› 2020, Vol. 8 ›› Issue (3) : 195-223.
PDF(254 KB)
PDF(254 KB)
Implementation of Presolving and Interior-Point Algorithm for Linear & Mixed Integer Programming: SOFTWARE
Linear and mixed integer programming are very popular and important methods to make efficient scientific management decision. With large size of real application data, the use of linear-mixed integer programming is facing problems with more complexity; therefore, preprocessing techniques become very important. Preprocessing aims to check and delete redundant information from the problem formulation. It is a collection of techniques that reduce the size of the problem and try to strengthen the formulation. Fast and effective preprocessing techniques are very important and essential for solving linear or mixed integer programming instances. In this paper, we demonstrate a set of techniques to presolve linear and mixed integer programming problems. Experiment results showed that when preprocessing is well done, then it becomes easier for the solver; we implemented interior-point algorithm for computational experiment. However, preprocessing is not enough to reduce the size and total nonzero elements from the constraints matrix. Moreover, we also demonstrate the impact of minimum degree reordering on the speed and storage requirements of a matrix operation. All techniques mentioned above are presented in a multifunctional software to facilitate users.
linear programming / mixed-integer programming / preprocessing / minimum degree reordering / interior-point algorithm / software {{custom_keyword}} /
Table 1 Computational results/LP |
| Original Size | Presolved Size | ||||||||
| Problem | rows | cols | nnz | rows | cols | nnz | Presolve time(s) | LP obj | |
| 25FV47 | 821 | 1876 | 10705 | 717 | 1769 | 9948 | 6.111 | 5501.85 | |
| ADLITTLE | 56 | 138 | 424 | 53 | 134 | 412 | 0.026 | 225495 | |
| AFIRO | 27 | 51 | 102 | 20 | 41 | 83 | 0.027 | -464.753 | |
| AGG | 488 | 615 | 2862 | 147 | 232 | 889 | 1.08 | -3.60 | |
| AGG2 | 516 | 758 | 4740 | 283 | 509 | 2670 | 0.348 | -2.02 | |
| AGG3 | 516 | 758 | 4756 | 288 | 514 | 2717 | 0.327 | 1.03 | |
| BANDM | 305 | 472 | 2494 | 177 | 332 | 1479 | 0.396 | -158.618 | |
| BEACONFD | 173 | 295 | 3408 | 30 | 87 | 255 | 0.092 | 33609 | |
| BLEND | 74 | 114 | 522 | 58 | 93 | 422 | 0.058 | -30.8121 | |
| BNL1 | 643 | 1586 | 5532 | 475 | 1355 | 4953 | 0.759 | 1977.63 | |
| BOEING1 | 351 | 726 | 3827 | 288 | 654 | 2574 | 0.195 | -335.213 | |
| BOEING2 | 166 | 305 | 1358 | 122 | 261 | 912 | 0.041 | -315.013 | |
| BORE3D | 233 | 334 | 1448 | 54 | 80 | 376 | 0.364 | 1373.08 | |
| BRANDY | 220 | 303 | 2202 | 109 | 209 | 1552 | 0.383 | 1518.51 | |
| CAPRI | 271 | 496 | 1965 | 212 | 390 | 1366 | 0.121 | 2690.02 | |
| CYCLE | 1903 | 3378 | 21248 | 1214 | 2550 | 14355 | 48.907 | -5.0801 | |
| DEGEN2 | 444 | 757 | 4201 | 378 | 693 | 4030 | 0.213 | -1435.18 | |
| DEGEN3 | 1503 | 2604 | 25432 | 1410 | 2513 | 25243 | 6.029 | -987.291 | |
| E226 | 223 | 472 | 2768 | 156 | 385 | 2415 | 0.17 | -18.7519 | |
| ETAMACRO | 400 | 816 | 2537 | 318 | 619 | 1912 | 0.239 | -755.699 | |
| FFFFF800 | 524 | 1028 | 6401 | 294 | 798 | 4785 | 2.096 | 555680 | |
| FINNIS | 497 | 1064 | 2760 | 348 | 743 | 1766 | 0.561 | 172791 | |
| FIT1D | 24 | 1049 | 13427 | 24 | 1047 | 13409 | 0.752 | -9146.38 | |
| FIT1P | 627 | 1677 | 9868 | 627 | 1655 | 9846 | 2.274 | 9146.38 | |
| FORPLAN | 161 | 492 | 4634 | 102 | 409 | 4102 | 0.311 | -664.196 | |
| GANGES | 1309 | 1706 | 6937 | 400 | 738 | 2350 | 2.564 | -109586 | |
| GROW15 | 300 | 645 | 5620 | 300 | 645 | 5620 | 0.177 | -1.07 | |
| GROW22 | 440 | 946 | 8252 | 440 | 946 | 8252 | 0.377 | -1.61 | |
| GROW7 | 140 | 301 | 2612 | 140 | 301 | 2612 | 0.094 | -4.78 | |
| ISRAEL | 174 | 316 | 2443 | 163 | 304 | 2419 | 0.065 | -896645 | |
| KB2 | 43 | 68 | 313 | 38 | 63 | 299 | 0.047 | -1749.9 | |
| LOTFI | 153 | 366 | 1136 | 117 | 329 | 643 | 0.063 | -25.2647 | |
| MAROS | 846 | 1966 | 10137 | 559 | 1261 | 6235 | 6.167 | -58063.7 | |
| NESM | 662 | 3105 | 13470 | 599 | 2803 | 12959 | 4.61 | 1.41 | |
| PEROLD | 625 | 1594 | 7317 | 559 | 1329 | 5515 | 5.574 | -11521.4 | |
| PILOT4 | 410 | 1211 | 7342 | 369 | 964 | 4808 | 5.018 | -5514.72 | |
| PILOTNOV | 975 | 2446 | 13331 | 805 | 2066 | 11792 | 9.139 | -449.28 | |
| PILOT-WE | 722 | 3008 | 9801 | 651 | 2584 | 8528 | 9.285 | -2.72 | |
| QAP8 | 912 | 1632 | 7296 | 742 | 1632 | 5936 | 1.763 | 203.518 | |
| RECIPELP | 91 | 204 | 687 | 60 | 118 | 431 | 0.057 | -266.616 | |
| SC105 | 105 | 163 | 340 | 83 | 141 | 289 | 0.037 | -52.2021 | |
| SC205 | 205 | 317 | 665 | 164 | 276 | 568 | 0.062 | -52.2021 | |
| SC50A | 50 | 78 | 160 | 38 | 66 | 134 | 0.031 | -64.5751 | |
| SC50B | 50 | 78 | 148 | 37 | 65 | 121 | 0.037 | -70 | |
| SCAGR25 | 471 | 671 | 1725 | 265 | 464 | 1206 | 0.094 | 1.48 | |
| SCAGR7 | 129 | 185 | 465 | 67 | 122 | 306 | 0.047 | -2.33 | |
| SCFXM1 | 330 | 600 | 2732 | 258 | 507 | 2325 | 0.404 | 18416.8 | |
| SCFXM2 | 660 | 1200 | 5469 | 514 | 1012 | 4630 | 2.062 | 36660.3 | |
| SCFXM3 | 990 | 1800 | 8206 | 770 | 1517 | 6935 | 4.508 | 54901.3 | |
| SCORPION | 388 | 466 | 1534 | 177 | 236 | 925 | 0.141 | 1717.1 | |
| SCRS8 | 490 | 1275 | 3288 | 399 | 1163 | 2976 | 1.143 | 904.297 | |
| SCSD1 | 77 | 760 | 2388 | 77 | 760 | 2388 | 0.071 | 8.66667 | |
| SCSD6 | 147 | 1350 | 4316 | 147 | 1350 | 4316 | 0.281 | 50.5 | |
| SCSD8 | 397 | 2750 | 8584 | 397 | 2750 | 8584 | 3.283 | 905 | |
| SCTAP1 | 300 | 660 | 1872 | 269 | 608 | 1713 | 0.178 | 1412.25 | |
| SCTAP2 | 1090 | 2500 | 7334 | 977 | 2303 | 6694 | 1.934 | 1724.82 | |
| SCTAP3 | 1480 | 3340 | 9734 | 1344 | 3111 | 8974 | 5.347 | 1424.01 | |
| SEBA | 515 | 1036 | 4360 | 8 | 22 | 42 | 0.174 | 15711.6 | |
| SHARE1B | 117 | 253 | 1179 | 98 | 234 | 1120 | 0.051 | -76589.3 | |
| SHARE2B | 96 | 162 | 777 | 93 | 159 | 771 | 0.062 | -415.732 | |
| SHELL | 536 | 1777 | 3558 | 355 | 1308 | 2610 | 0.886 | 1.21 | |
| SHIP04L | 402 | 2166 | 6380 | 288 | 1901 | 4282 | 0.508 | 1.79 | |
| SHIP04S | 402 | 1506 | 4400 | 188 | 1253 | 2819 | 0.281 | 1.80 | |
| SHIP08L | 778 | 4363 | 12882 | 470 | 3121 | 7122 | 2.922 | 1.91 | |
| SHIP08S | 778 | 2467 | 7194 | 236 | 1564 | 3564 | 0.876 | 1.92 | |
| SHIP12S | 1151 | 2869 | 8284 | 267 | 1870 | 4144 | 3.479 | 1.49 | |
| STAIR | 356 | 620 | 4021 | 311 | 486 | 3700 | 2.566 | -251.267 | |
| STANDATA | 359 | 1274 | 3230 | 276 | 566 | 1135 | 0.741 | 1257.7 | |
| STANDGUB | 361 | 1383 | 3339 | 276 | 566 | 1135 | 0.811 | 1257.7 | |
| STANDMPS | 467 | 1274 | 3878 | 372 | 1130 | 2459 | 1.515 | 1406.03 | |
| STOCFOR1 | 117 | 165 | 501 | 80 | 128 | 377 | 0.036 | -41132 | |
| VTP-BASE | 198 | 347 | 1052 | 48 | 87 | 234 | 0.05 | 129831 | |
| FIT2D | 25 | 10524 | 129042 | 25 | 10387 | 1E+06 | 35.203 | -68464.3 | |
| BNL2 | 2324 | 4486 | 14996 | 1193 | 3085 | 11602 | 22.626 | 1811.24 | |
| WOODW | 1098 | 8418 | 37487 | 703 | 5359 | 19739 | 17.75 | 1.30457 | |
| CZPROB | 929 | 3562 | 10708 | 464 | 2457 | 4897 | 4.861 | 2.18 | |
| SHIP12L | 1151 | 5533 | 16276 | 609 | 4170 | 9245 | 11.032 | 1.47 | |
| D6CUBE | 415 | 6184 | 37704 | 403 | 5443 | 34233 | 18.686 | 315.561 | |
| MODSZK1 | 687 | 1622 | 3170 | 623 | 1370 | 2798 | 8.761 | 322.98 | |
| PILOT-JA | 940 | 2355 | 16216 | 756 | 1742 | 11257 | 7.409 | -6113.06 | |
| TRUSS | 1000 | 8806 | 27836 | 1000 | 8806 | 27836 | 13.598 | 458816 | |
| STOCFOR2 | 2157 | 3045 | 9357 | 1768 | 2656 | 7666 | 8.696 | -39024.4 | |
| GREENBEB | 2392 | 5602 | 31075 | 1498 | 3695 | 22719 | 171.425 | -4237760 | |
| PILOT | 1441 | 4860 | 44375 | 1336 | 4462 | 41578 | 51.605 | -557.485 | |
| D2Q06C | 2171 | 5831 | 33081 | 1966 | 5515 | 31530 | 120.288 | 122784 | |
| 80BAU3B | 2622 | 12061 | 23264 | 1935 | 10419 | 20690 | 131.054 | 987225 | |
| QAP12 | 3192 | 8856 | 38304 | 2794 | 8856 | 33528 | 73.416 | 522.926 | |
| PILOT87 | 2030 | 6680 | 74949 | 1961 | 6357 | 72133 | 184.36 | 301.715 | |
| FIT2P | 3000 | 13525 | 50284 | 3000 | 13525 | 50284 | 157.06 | 68464.4 | |
Table 2 Computational results/MIP |
| Original Size | Presolved Size | |||||||||
| Problem | Type | rows | cols | nnz | rows | cols | nnz | Presolve time(s) | LP obj | |
| air04 | BP | 823 | 8904 | 72965 | 708 | 8873 | 63940 | 26.801 | 55535.7 | |
| eil33-2 | BP | 32 | 4516 | 44243 | 32 | 4516 | 44243 | 4.058 | 811.739 | |
| eilB101 | BP | 100 | 2818 | 24120 | 100 | 2816 | 24106 | 2.056 | 1075.77 | |
| enlight13 | IP | 169 | 338 | 962 | 0 | 0 | 0 | 0.289 | 0 | |
| enlight14 | IP | 196 | 392 | 1120 | 0 | 0 | 0 | 0.344 | 0 | |
| enlight15 | IP | 225 | 450 | 1290 | 0 | 0 | 0 | 0.296 | 0 | |
| enlight16 | IP | 256 | 512 | 1472 | 0 | 0 | 0 | 0.276 | 0 | |
| enlight9 | IP | 81 | 162 | 450 | 0 | 0 | 0 | 0.266 | 0 | |
| markshare-5-0 | MBP | 5 | 45 | 203 | 5 | 45 | 203 | 0.248 | 0.005885 | |
| neos-1440225 | BP | 330 | 1285 | 14168 | 265 | 1285 | 11672 | 0.52 | 36.154 | |
| neos-807456 | BP | 840 | 1635 | 4905 | 776 | 1481 | 4480 | 1.973 | 280.087 | |
| ns1952667 | IP | 41 | 13264 | 335643 | 40 | 13035 | 330576 | 176.704 | 0 | |
| t1717 | BP | 551 | 73885 | 325689 | 551 | 16505 | 85474 | 754.081 | 134531 | |
| t1722 | BP | 338 | 36630 | 133096 | 338 | 9088 | 39354 | 2973967 | 98815.5 | |
| timtab 1 | MIP | 171 | 397 | 829 | 110 | 252 | 535 | 0.354 | 28694 | |
| ic97-potential | MIP | 1046 | 728 | 3138 | 523 | 728 | 1569 | 2.049 | 3900.13 | |
| iis-100-0-cov | BP | 3831 | 100 | 22986 | 3831 | 100 | 600 | 0.626 | 16.7977 | |
| iis-bupa-cov | BP | 4803 | 345 | 38392 | 4801 | 339 | 2712 | 2.211 | 42.6623 | |
| iis-pima-cov | BP | 7201 | 768 | 71941 | 7201 | 736 | 7358 | 7.743 | 74.384 | |
| m100n500k4r1 | BP | 100 | 500 | 2000 | 100 | 500 | 2000 | 0.201 | -25.1098 | |
| macrophage | BP | 3164 | 2260 | 9492 | 3164 | 2260 | 6780 | 14.249 | 0.1197 | |
| neos-1616732 | BP | 1999 | 200 | 3998 | 0 | 0 | 0 | 0.242 | 100 | |
| p6b | BP | 5852 | 462 | 11704 | 0 | 0 | 0 | 0.579 | -231 | |
| queens-30 | BP | 960 | 900 | 93440 | 900 | 900 | 87320 | 3.115 | -70.9438 | |
| ramos3 | BP | 2187 | 2187 | 32805 | 2187 | 2187 | 22725 | 14.92 | 145.848 | |
| sts405 | BP | 27270 | 405 | 81810 | 27270 | 405 | 1215 | 14.797 | 135.055 | |
| sts729 | BP | 88452 | 729 | 265356 | 88452 | 729 | 2187 | 97.738 | 243.082 | |
Table 3 Impact of minimum degree reordering/LP |
| Presolved Size | Cholesky Factor B.M.D | Cholesky Factor A.M.D | ||||||||||||
| Problem | rows | cols | nnz | rows | nnz | % | nnz | % | time(s) | nnz | % | |||
| 25fv47 | 717 | 1769 | 9948 | 717 | 21211 | 4.126 | 100151 | 19.48 | 0.02 | 29871 | 5.81 | |||
| 80BAU3B | 1935 | 10419 | 20690 | 1935 | 20089 | 0.537 | 408759 | 10.92 | 0.05 | 37700 | 1.01 | |||
| ADLITTLE | 53 | 134 | 412 | 53 | 679 | 24.172 | 751 | 26.74 | 0.06 | 393 | 13.99 | |||
| AFIRO | 20 | 41 | 83 | 20 | 112 | 28 | 129 | 32.25 | 0.01 | 79 | 19.75 | |||
| AGG2 | 283 | 509 | 2670 | 283 | 10119 | 12.635 | 11574 | 14.45 | 0.01 | 7990 | 9.98 | |||
| AGG3 | 269 | 495 | 2616 | 269 | 8447 | 11.673 | 9963 | 13.77 | 0.01 | 7084 | 9.79 | |||
| BANDM | 177 | 332 | 1479 | 177 | 5121 | 16.346 | 12510 | 39.93 | 0.01 | 3462 | 11.05 | |||
| BLEND | 58 | 93 | 422 | 58 | 1250 | 37.158 | 1551 | 46.11 | 0.01 | 775 | 23.04 | |||
| BEACONFD | 46 | 114 | 634 | 46 | 526 | 24.858 | 610 | 28.83 | 0.01 | 286 | 13.52 | |||
| BNL1 | 475 | 1355 | 4953 | 475 | 8567 | 3.797 | 41674 | 18.47 | 0.01 | 10951 | 4.85 | |||
| BNL2 | 1193 | 3085 | 11602 | 1193 | 24221 | 1.702 | 209103 | 14.69 | 0.02 | 68371 | 4.08 | |||
| BOEING1 | 290 | 652 | 2998 | 290 | 7368 | 8.761 | 42045 | 49.99 | 0.01 | 5199 | 6.18 | |||
| BORE3D | 61 | 92 | 428 | 61 | 1265 | 33.996 | 1294 | 34.78 | 0.01 | 755 | 20.29 | |||
| BRANDY | 109 | 209 | 1552 | 109 | 3359 | 28.272 | 4052 | 34.1 | 0.01 | 2161 | 18.19 | |||
| CAPRI | 212 | 390 | 1366 | 212 | 4124 | 9.176 | 10965 | 23.07 | 0.01 | 3878 | 8.16 | |||
| CYCLE | 1214 | 2550 | 14355 | 1214 | 40152 | 2.724 | 170528 | 11.57 | 0.02 | 41759 | 2.83 | |||
| CZPROB | 464 | 2457 | 4897 | 464 | 5094 | 2.366 | 104931 | 48.74 | 0.01 | 2858 | 1.33 | |||
| D2Q06C | 1966 | 5515 | 31530 | 1966 | 52074 | 1.347 | 583526 | 15.1 | 0.05 | 132283 | 3.42 | |||
| D6CUBE | 403 | 5443 | 34233 | 403 | 23257 | 14.320 | 77935 | 47.99 | 0.01 | 50758 | 31.25 | |||
| DEGEN2 | 378 | 692 | 4028 | 378 | 14704 | 10.291 | 48631 | 34.04 | 0.02 | 15213 | 10.65 | |||
| DEGEN3 | 1410 | 2513 | 25243 | 1410 | 112742 | 5.671 | 588761 | 29.61 | 0.17 | 122627 | 6.17 | |||
| DFL001 | 5809 | 11634 | 34218 | 5809 | 78425 | 0.232 | 11229054 | 33.28 | 0.4 | 1533766 | 4.55 | |||
| E226 | 156 | 385 | 2415 | 156 | 4694 | 19.288 | 7171 | 29.47 | 0.01 | 3114 | 12.8 | |||
| ETAMACRO | 318 | 620 | 1913 | 318 | 4628 | 4.577 | 36608 | 36.2 | 0.01 | 10691 | 10.57 | |||
| FFFFF800 | 294 | 798 | 4785 | 294 | 10802 | 12.497 | 32181 | 37.23 | 0.01 | 8307 | 9.61 | |||
| FINNIS | 350 | 747 | 1777 | 350 | 4084 | 3.334 | 24612 | 20.09 | 0.01 | 3994 | 3.26 | |||
| FIT1D | 24 | 1047 | 13409 | 24 | 560 | 97.222 | 300 | 52.08 | 0.01 | 296 | 51.39 | |||
| FIT1P | 627 | 1655 | 9846 | 627 | 393129 | 100.000 | 196878 | 50.08 | 0.02 | 196878 | 50.08 | |||
| FIT2D | 25 | 10387 | 127784 | 25 | 617 | 98.720 | 325 | 52 | 0.01 | 324 | 51.84 | |||
| FIT2P | 3000 | 13525 | 50284 | 3000 | 9000000 | 100.000 | 4501500 | 50.02 | 0.51 | 4501500 | 50.02 | |||
| FORPLAN | 103 | 412 | 4107 | 103 | 3683 | 34.716 | 4454 | 41.98 | 0.01 | 2572 | 24.24 | |||
| GANGES | 400 | 738 | 2350 | 400 | 5442 | 3.401 | 5255 | 3.28 | 0.01 | 4005 | 2.5 | |||
| GFRD-PNC | 460 | 1004 | 2133 | 460 | 1790 | 0.846 | 15313 | 7.24 | 0.01 | 1707 | 0.81 | |||
| GREENBEA | 1498 | 3703 | 22808 | 1498 | 53126 | 2.367 | 382065 | 17.03 | 0.03 | 44407 | 1.98 | |||
| GREENBEB | 1498 | 3695 | 22719 | 1498 | 52578 | 2.343 | 357086 | 15.91 | 0.03 | 43107 | 1.92 | |||
| GROW7 | 140 | 300 | 2611 | 140 | 3040 | 15.510 | 2730 | 13.93 | 0.01 | 2730 | 13.93 | |||
| GROW15 | 300 | 644 | 5619 | 300 | 6560 | 7.289 | 6090 | 6.77 | 0.01 | 6090 | 6.77 | |||
| GROW22 | 440 | 945 | 8251 | 440 | 9640 | 4.979 | 9030 | 4.66 | 0.01 | 9030 | 4.66 | |||
| ISRAEL | 163 | 304 | 2419 | 163 | 21739 | 81.821 | 12526 | 47.15 | 0.01 | 11608 | 43.69 | |||
| KB2 | 38 | 63 | 299 | 38 | 1242 | 86.011 | 690 | 47.78 | 0.01 | 661 | 45.78 | |||
| LOTFI | 117 | 329 | 643 | 117 | 1269 | 9.270 | 2819 | 20.59 | 0.01 | 1060 | 7.74 | |||
| MAROS | 559 | 1261 | 6235 | 559 | 14513 | 4.644 | 69779 | 22.33 | 0.01 | 12084 | 3.86 | |||
| MAROS-R7 | 2152 | 6578 | 80167 | 2152 | 324232 | 7.001 | 420848 | 9.09 | 0.03 | 504700 | 10.9 | |||
| MODSZK1 | 623 | 1370 | 2793 | 623 | 10955 | 2.823 | 142016 | 36.59 | 0.01 | 9921 | 2.56 | |||
| NESM | 599 | 2803 | 12959 | 599 | 7987 | 2.226 | 110020 | 30.66 | 0.01 | 19988 | 5.57 | |||
| PEROLD | 559 | 1329 | 5515 | 559 | 11869 | 3.798 | 37831 | 12.11 | 0.01 | 20496 | 6.56 | |||
| PILOT | 1336 | 4462 | 41578 | 1336 | 117634 | 6.591 | 599693 | 33.6 | 0.04 | 187971 | 10.53 | |||
| PILOT4 | 369 | 964 | 4808 | 369 | 12557 | 9.222 | 25435 | 18.68 | 0.01 | 13951 | 10.25 | |||
| PILOT87 | 1961 | 6357 | 72133 | 1961 | 232459 | 6.045 | 1020830 | 26.55 | 0.07 | 419759 | 10.92 | |||
| PILOT-JA | 756 | 1742 | 11257 | 756 | 25346 | 4.435 | 91271 | 15.97 | 0.02 | 41888 | 7.33 | |||
| PILOTNOV | 805 | 2066 | 11792 | 805 | 19881 | 3.068 | 92443 | 14.27 | 0.01 | 42948 | 6.63 | |||
| PILOT-WE | 651 | 2584 | 8528 | 651 | 9563 | 2.256 | 32492 | 7.67 | 0.01 | 15632 | 3.69 | |||
| QAP8 | 742 | 1632 | 5936 | 742 | 19348 | 3.514 | 270524 | 49.14 | 0.02 | 129405 | 23.5 | |||
| QAP12 | 2794 | 8856 | 33528 | 2794 | 117632 | 1.507 | 3867888 | 49.55 | 0.27 | 2033854 | 26.05 | |||
| QAP15 | 5698 | 22275 | 85470 | 5698 | 308322 | 0.950 | 16126222 | 49.67 | 1.58 | 8673406 | 26.71 | |||
| RECIPELP | 60 | 118 | 431 | 60 | 424 | 11.778 | 245 | 6.81 | 0.01 | 242 | 6.72 | |||
| SC50A | 38 | 66 | 134 | 38 | 218 | 15.097 | 274 | 18.98 | 0.01 | 185 | 12.81 | |||
| SC105 | 83 | 141 | 289 | 83 | 523 | 7.592 | 844 | 12.85 | 0.01 | 486 | 7.05 | |||
| SC205 | 164 | 276 | 568 | 164 | 1198 | 4.454 | 2437 | 9.06 | 0.01 | 1138 | 4.23 | |||
| SCAGR7 | 67 | 122 | 306 | 67 | 761 | 16.953 | 622 | 13.86 | 0.01 | 491 | 10.94 | |||
| SCAGR25 | 265 | 464 | 1206 | 265 | 3227 | 4.595 | 2584 | 3.68 | 0.01 | 2111 | 3.01 | |||
| SCFXM1 | 258 | 507 | 2325 | 258 | 4970 | 7.466 | 8293 | 12.46 | 0.01 | 3757 | 5.64 | |||
| SCFXM2 | 514 | 1012 | 4630 | 514 | 9856 | 3.731 | 16714 | 6.33 | 0.01 | 7401 | 2.8 | |||
| SCFXM3 | 770 | 1517 | 6935 | 770 | 14742 | 2.486 | 25135 | 4.24 | 0.01 | 11053 | 1.86 | |||
| SCORPION | 177 | 236 | 925 | 177 | 2353 | 7.511 | 2051 | 6.35 | 0.01 | 1526 | 4.87 | |||
| SCRS8 | 399 | 1163 | 2976 | 399 | 3059 | 1.921 | 9028 | 5.67 | 0.01 | 4341 | 2.73 | |||
| SCSD1 | 77 | 760 | 2388 | 77 | 2149 | 36.246 | 1480 | 24.96 | 0.01 | 1382 | 23.31 | |||
| SCSD6 | 147 | 1350 | 4316 | 147 | 3917 | 18.127 | 2774 | 12.84 | 0.01 | 2524 | 11.68 | |||
| SCSD8 | 397 | 2750 | 8584 | 397 | 7779 | 4.936 | 5905 | 3.75 | 0.01 | 5877 | 3.73 | |||
| SCTAP1 | 269 | 608 | 1713 | 269 | 2765 | 3.821 | 7705 | 10.65 | 0.01 | 2317 | 3.2 | |||
| SCTAP2 | 977 | 2303 | 6694 | 977 | 10831 | 1.135 | 97442 | 10.21 | 0.01 | 11880 | 1.24 | |||
| SCTAP3 | 1344 | 3111 | 8974 | 1344 | 14700 | 0.814 | 182440 | 10.1 | 0.02 | 16069 | 0.89 | |||
| SEBA | 8 | 22 | 41 | 8 | 28 | 43.750 | 26 | 40.63 | 0.05 | 18 | 28.13 | |||
| SHARE1B | 98 | 234 | 1120 | 98 | 1744 | 18.159 | 2118 | 22.05 | 0.04 | 1240 | 12.91 | |||
| SHARE2B | 93 | 159 | 771 | 93 | 1597 | 18.465 | 1072 | 12.39 | 0.03 | 1015 | 11.74 | |||
| SHELL | 355 | 1308 | 2610 | 355 | 2829 | 2.245 | 17629 | 13.39 | 0.04 | 3690 | 2.93 | |||
| SHIP04L | 288 | 1901 | 4282 | 288 | 4908 | 5.917 | 38540 | 46.47 | 0.04 | 2627 | 3.17 | |||
| SHIP04S | 188 | 1253 | 28198 | 188 | 3116 | 8.816 | 15834 | 44.8 | 0.04 | 1681 | 4.76 | |||
| SHIP08L | 470 | 3121 | 7122 | 470 | 8198 | 3.711 | 103978 | 47.07 | 0.05 | 4450 | 2.01 | |||
| SHIP08S | 236 | 1564 | 3564 | 236 | 3850 | 6.913 | 24829 | 44.58 | 0.03 | 2159 | 3.88 | |||
| SHIP12L | 609 | 4170 | 9245 | 609 | 10311 | 2.780 | 178372 | 48.09 | 0.05 | 5521 | 1.49 | |||
| SHIP12S | 267 | 1870 | 4144 | 267 | 4153 | 5.826 | 32813 | 46.03 | 0.04 | 2271 | 3.19 | |||
| SIERRA | 987 | 2470 | 7186 | 987 | 4279 | 0.439 | 9003 | 0.92 | 0.03 | 4055 | 0.42 | |||
| STAIR | 306 | 475 | 3655 | 306 | 22654 | 24.194 | 26052 | 27.82 | 0.04 | 18431 | 19.68 | |||
| STANDATA | 273 | 561 | 1125 | 273 | 1907 | 2.559 | 11744 | 15.76 | 0.04 | 2158 | 2.9 | |||
| STANDGUB | 276 | 566 | 1135 | 276 | 1924 | 2.526 | 11972 | 15.72 | 0.04 | 2169 | 2.85 | |||
| STANDMPS | 372 | 1130 | 2459 | 372 | 3564 | 2.575 | 39391 | 28.46 | 0.04 | 3115 | 2.25 | |||
| STOCFOR1 | 80 | 128 | 377 | 80 | 842 | 13.156 | 841 | 13.44 | 0.03 | 679 | 10.61 | |||
| STOCFOR2 | 1768 | 2656 | 7666 | 1768 | 24074 | 0.770 | 358855 | 11.48 | 0.25 | 26689 | 0.85 | |||
| STOCFOR3 | 13816 | 20682 | 59868 | 13816 | 232012 | 0.122 | 22356712 | 11.71 | 63.83 | 229672 | 0.12 | |||
| TRUSS | 1000 | 8806 | 27836 | 1000 | 25170 | 2.517 | 273100 | 27.31 | 0.07 | 58274 | 5.83 | |||
| VTP-BASE | 48 | 87 | 234 | 48 | 654 | 28.385 | 364 | 15.8 | 0.03 | 364 | 15.8 | |||
| WOOD1P | 170 | 1717 | 44573 | 170 | 23104 | 79.945 | 14535 | 50.29 | 0.04 | 23104 | 79.945 | |||
| WOODW | 703 | 5359 | 19739 | 703 | 25925 | 5.246 | 122006 | 24.69 | 0.05 | 31217 | 6.32 | |||
Table 4 Impact of minimum degree reordering (continued)/MIP |
| Presolved Size | Cholesky Factor B.M.D | Cholesky Factor A.M.D | ||||||||||||
| Problem | rows | cols | nnz | rows | nnz | % | nnz | % | time(s) | nnz | % | |||
| air04 | 708 | 8873 | 63940 | 708 | 84938 | 16.94 | 224172 | 44.72 | 0.02 | 168141 | 33.54 | |||
| eil33-2 | 32 | 4516 | 44243 | 32 | 1024 | 100.00 | 528 | 51.56 | 0.01 | 528 | 51.56 | |||
| eilB101 | 100 | 2816 | 24106 | 100 | 7942 | 79.42 | 5034 | 50.34 | 0.01 | 4753 | 47.53 | |||
| markshare_5_0 | 5 | 45 | 203 | 5 | 25 | 100.00 | 15 | 60.00 | 0.01 | 15 | 60.00 | |||
| neos-1440225 | 265 | 1285 | 11672 | 265 | 13011 | 18.53 | 29166 | 41.53 | 0.01 | 13131 | 18.70 | |||
| neos-807456 | 776 | 1481 | 4480 | 776 | 9636 | 1.60 | 230475 | 38.27 | 0.02 | 97487 | 16.19 | |||
| ns1952667 | 40 | 13035 | 330576 | 40 | 1600 | 100.00 | 820 | 51.25 | 0.01 | 820 | 51.25 | |||
| t1717 | 551 | 16505 | 85474 | 551 | 84929 | 27.97 | 129563 | 42.68 | 0.02 | 129182 | 42.55 | |||
| t1722 | 338 | 9088 | 39354 | 338 | 36530 | 31.98 | 52411 | 45.88 | 0.01 | 44822 | 39.23 | |||
| timtab 1 | 110 | 252 | 535 | 110 | 3146 | 26.00 | 4211 | 34.80 | 0.01 | 1939 | 16.02 | |||
| m100n500k4r1 | 100 | 500 | 2000 | 100 | 4596 | 45.96 | 4881 | 48.81 | 0.01 | 4282 | 42.82 | |||
| queens-30 | 900 | 900 | 87320 | 900 | 810000 | 100.00 | 405450 | 50.06 | 0.04 | 405450 | 50.06 | |||
| sts729 | 88452 | 729 | 2187 | 88452 | 96412680 | 1.23 | 96412680 | 1.23 | 0.06 | 96412680 | 1.23 | |||
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
Williams H. A reduction procedure for linear and integer programming models. Re-dundancy in Mathematical Programming. Volume 206 of Lecture Notes in Economics and Mathematicals Systems. Springer Berlin Heidelberg, 1983: 87-107.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
Achterberg T. Constraint integer programming. Technical University of Berlin, 2007.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
Mahajan A. Presolving mixed-integer linear programs. Mathematics and Computer Science Division, Argonne National Laboratory, Argonne, IL 60439, 2010.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
Sadhana V V. Efficient presolving in linear programming. University of Florida, 2002.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
The work is sponsored by CAS-TWAS President's Fellowship for International PhD Students. The authors would like to thank Dr. Guoliang Yang for his helpful suggestions in the process of design for the software. The first author would like to thank my labmates for their continuous support and guidance, teaching me how to improve data results.
PDF(254 KB)
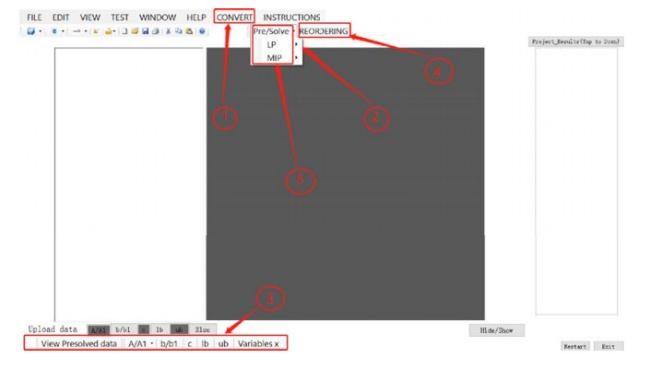
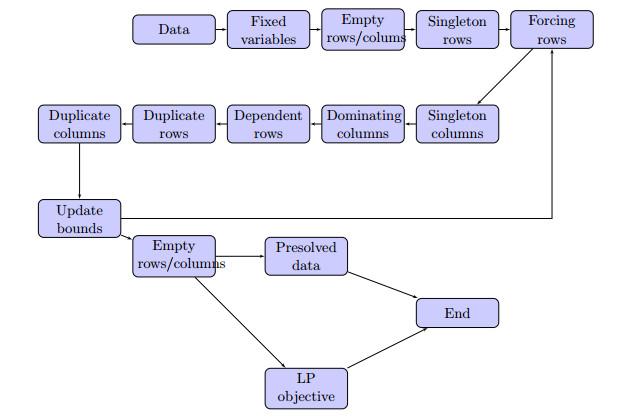
 Figure 1 Software home page/screenFigure 2 Main functionalitiesFigure 3 Detailed preprocessing techniques
Figure 1 Software home page/screenFigure 2 Main functionalitiesFigure 3 Detailed preprocessing techniques Table 1 Computational results/LPTable 2 Computational results/MIPTable 3 Impact of minimum degree reordering/LPTable 4 Impact of minimum degree reordering (continued)/MIP
Table 1 Computational results/LPTable 2 Computational results/MIPTable 3 Impact of minimum degree reordering/LPTable 4 Impact of minimum degree reordering (continued)/MIP/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}